

Roberto Barbosa (PhD Student)
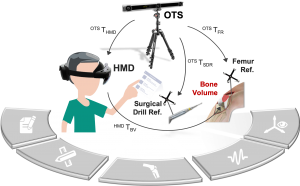
The three main modules that compound a computer-assisted surgery (CAS) system, which are being addressed in the project, are the preoperative module, the surgical navigation module, and the optical tracking system. The interconnection of the presented modules compounds a full integrated CAS system that allows the surgeon to perform the intervention with precision and it guides the surgeon to achieve the preoperative plan overcoming the main challenges of the surgery, such as the reduced field of view and associated complications.
The work already developed within this project focuses on the implementation of this system in a knee-specific intervention, but the main focus is to develop an adaptable and modular system to be suitable for different surgical interventions, with a preoperative plan module well connected with the surgical navigation module. Within the surgical navigation module, software manipulation is being performed using Leapmotion, an intuitive and practical approach for the surgeon, and he himself can control all software during surgery. The augmented reality is also adapted to the module so that the visual feedback provided by the surgical navigation is on the anatomical structure of the patient being treated allowing the surgeon to always have the same focus during the intervention.
Our Team
Currently, this team involves two PhD students:
- Roberto M. Barbosa – MSc in Biomedical Engineering. PhD Student in Leaders for Technical Industries
-
Diana Rito – MSc in Biomedical Engineering. PhD Student in Biomedical Engineering
- Bruno Magalhães – MSc student in Computer Engineering
- Eduardo Teixeira – MSc student in Computer Engineering