
Our motivation
WALKit is a smart robotic walker specially designed for persons with balance disorders, namely cerebellar ataxia. This neurological disorder is responsible for a lack of multi-articular coordination and balance control. It affects the cerebellum, and it can be hereditary or a symptom of other diseases, such as stroke, tumour, cerebral palsy, or multiple sclerosis.
Persons with ataxia have lack of coordination, troubles eating and swallowing, heart conditions, gait abnormalities, poor balance, tremors, slurred speech, and eye movement abnormalities. Consequently, these persons exhibit an ongoing loss of mobility, losing their autonomy and independence.
Proposed solution
Our group aimed to develop a multifunctional assistive device for mobility assistance and gait rehabilitation of persons with ataxia. We aim a user-oriented therapy, in which the robotic walker can be personalized to the user’s intentions and clinical needs.
The project started in 2012 and it is, currently, on its fourth prototype. A fifth prototype has already been presented in November 2020, as a result of the EML project – Equipamento Multifuncional de Auxílio Técnico à Locomoção, under Grant POCI-01-0247-FEDER-033067, supported by ANI – Agência Nacional de Inovação, through the Incentive System for Business R&DT – Demonstration Projects in Co-Operation and co-financed by ERDF – European Regional Development Fund, through the Operational Program COMPETE 2020.

WALKit provides several advantages over conventional devices, namely:
- It offers a strong base of support
- It has an ergonomic platform made of soft materials with a special curvature to ensure correct posture, as well as comfort and stability
- Two handles to assist, safely, sit-to-stand and stand-to-sit
- Two electric lifting systems that allow personalization for all
- A special handlebar for persons with mobility disorders that allow smooth and intuitive manoeuvrability
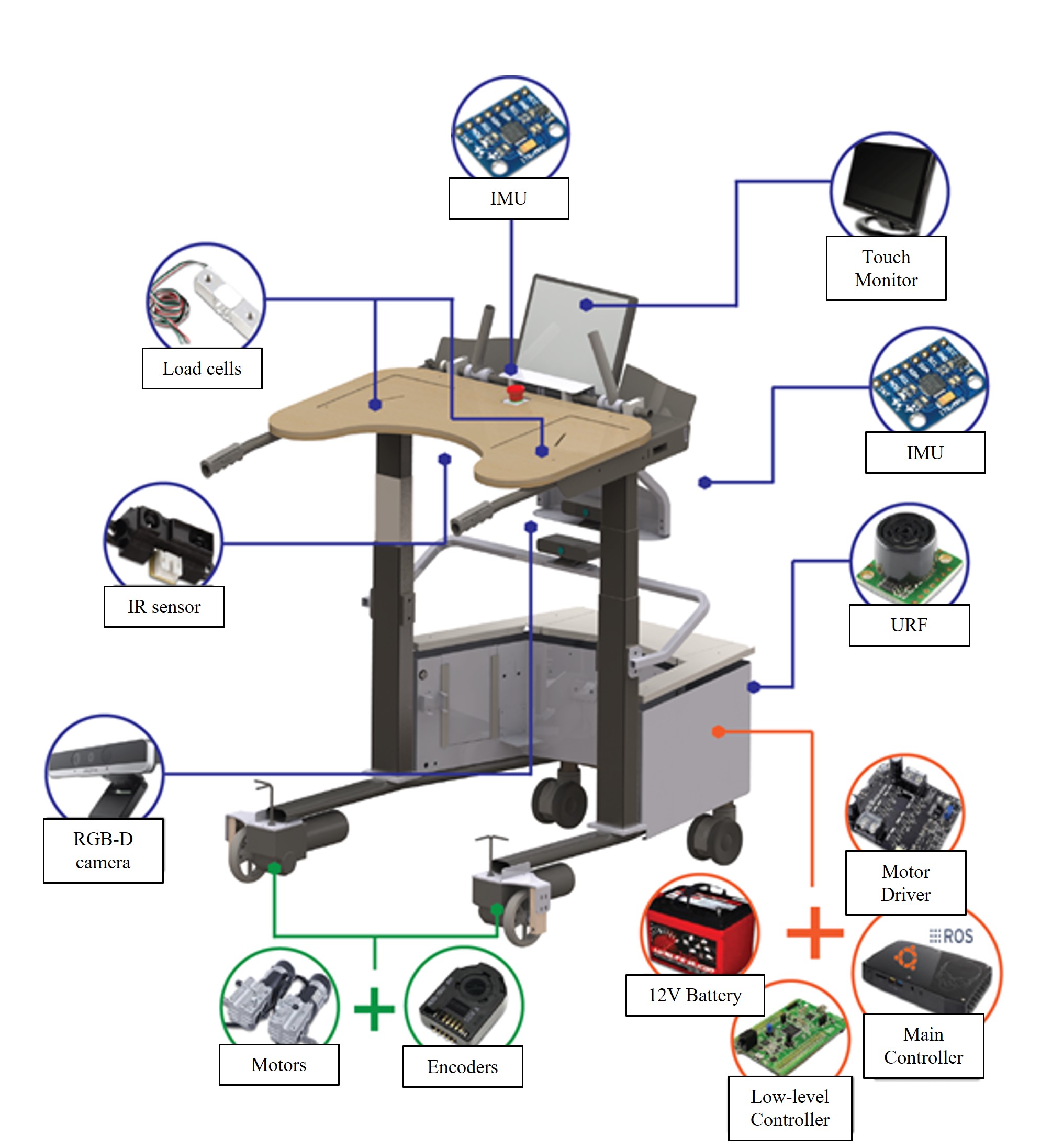
Since our aim is to provide a user-oriented rehabilitation, providing comfort, safety, and stability to the patient, WALKit is equipped with several integrated sensors and actuactors that allow an intuitive drive, but also the continuous monitoring of the patient throughout therapy. With these sensors and actuactors, different algorithms are being developed to boost WALKit as an effective therapy tool, acting as a complement to the clinicians’ work.
Until now, different funcionalities have been developed, namely pose estimation using RGB-D cameras, visual biofeedback of gait and posture, balance analysis, and cognitive serious videogames to enable a more collaborative therapy that incites the patient’s active participation.
Application scenarios
WALKit is specially designed to work in healthcare institutions, namely hospitals, rehabilitation centres, long-term care units, and nursing homes.
This device was thought and designed to address the gait and balance disorders of patients with degenerative ataxia. However, since ataxia can be acquired by several factors, the spectrum of the target population is extensive and could cover any pathology that causes motor damage. Furthermore, we hope that this device can also assist the gait of elderly people towards healthy ageing.
Our Team
Currently, WALKit team involves a PhD student and four MSc students in Biomedical Engineering and Informatics:
- João M. Lopes – MSc in Biomedical Engineering. PhD Student in Biomedical Engineering
- Diogo Emanuel Nogueira de Oliveira, MSc Student in Industrial Electronics and Computer Engineering, “Deep learning-based gait event detection and evaluation of gait-related spatiotemporal parameters in a robotic walker”, pg50328@alunos.uminho.pt
Our Alumni
- Carolina Maria Cunha Gonçalves, Master’s in Biomedical Engineering, “A Deep Learning solution for real-time human motion decoding in smart walkers”, a80932@alunos.uminho.pt
- Mariana Brito Palma Campos Costa, Master’s in Biomedical Engineering, “A biofeedback strategy for human postural sway control in a smart walker”, a80625@alunos.uminho.pt
- Ana Margarida Reis Maia Campos, Master’s in Computer Engineering, “A software to manage rehabilitation sessions with a robotic walker”, a85166@alunos.uminho.pt
- Alexandre Rzepecki Rodrigues, Master’s in Computer Engineering, “Exploring the use of serious videogames in a robotic walker to improve ataxic gait”, a81451@alunos.uminho.pt
Our Partners
The consortium promoting EML project involved two companies, Orthos XXI, Unipessoal, Lda. and Tecnicunha – Eletricidade e Electrónica, Lda., and an entity of the R&I System, the University of Minho. We also have the support of a medical team from the Clinical Academic Center of Braga (2CA-Braga, a partnership between U.Minho and Hospital of Braga), which allows us to test our solutions with real patients who need a walking aid.

Grant
This project has been supported in part by the ERDF Funds through the COMPETE 2020 –Programa Operacional Competitividade e Internacionalização (POCI) and P2020 with the Reference Project EML under Grant POCI-01-0247-FEDER-033067.
