
Exosuit with a Bioinspired and Textile-Based Active Actuation for Daily Assistance
Our motivation
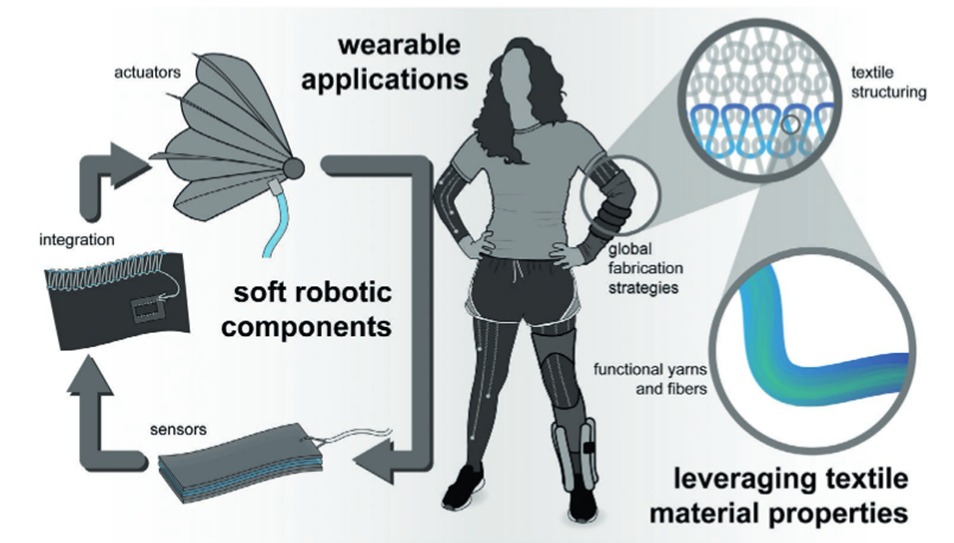
Seniors and patients with neuromuscular diseases face limitations in performing activities of daily living (ADLs), requiring easy-to-use wearable robots to regain independence. Conventional assistive devices and wearable robots are extremely bulky, uncomfortable, and unsafe, significantly hindering their adoption into everyday life. The main goal of this project is to develop a textile-based, fully active, wearable exosuit for walking and sitting assistance, integrating textile-based artificial muscle actuators made of shape memory alloys and a bio-inspired architecture.
Proposed solution
This research focuses its approach on three pilars: the use of an artificial muscle made of a novel material with shape memory properties, a bio-inspired textile-based transmission layer that can be worn like regular everyday clothing, and a hip-knee synergistic actuation.
Artificial Muscle Shape Memory Alloy Actuator: Shape memory alloys are a lightweight, flexible and versatile material that, when heated, recovers its shape, generating significant forces. It can be machined into very thin wires, thus being perfect for introduction into everyday clothing as a fiber. The focus of this project is to develop an actuator that is fast in heating and cooling, safe to the user, lightweight, portable, and capable of generating significant forces. With this in mind, we are developing novel control, heating, and cooling strategies, as well as new methods to implement and integrate these wires into clothing in a way that will generate the needed assistance for the user.
Bio-Inspired Clothing: One of the major challenges in wearable exosuits is the effective transmission of force from the actuator to the human body. To address this, we propose a bio-inspired garment made of hybrid materials that mimic the stiffness and rigidity of underlying anatomical structures. By replicating the mechanical properties of highly optimized force-transmitting elements – such as tendons and muscles – we aim to develop a garment capable of delivering assistive forces more efficiently, while maintaining user comfort and safety.
Hip-Knee Synergistic Actuation: Following the use of force-based, textile-based actuators, we intend of synergistically assist two joints. This is possible due to the specific characteristics of our actuators which, by spanning and actuating multiple joints, will be able to more effectively and efficiently transmits the actuating forces.
Application scenarios
The developed actuator can, in general, be used for actuating any of the joints associated with everyday motion, both upper and lower body. For the moment, we are tackling lower limbs, aiming for gait and sitting tasks. Fundamentally, the intended use of the exosuit is at home, outdoors and in public, assisting the user with their tasks, while ensuring comfort, discretion and efficacy.
Our Team
Currently, ExoSuit team involves a PhD student and one MSc student:
- Ricardo Andrade – MSc in Biomedical Engineering. PhD Student in Biomedical Engineering.
- Nuno Brito – MSc Student in Industrial Electronics and Computer Engineering.