
Motivation
Work-Related Musculoskeletal Disorders (WRMSDs) are a major concern of Industry 5.0 (I5.0). Represent 53% of occupational diseases, with annual costs of €240B. Further, 30% of the years lived with a disability (YLD) result from Musculoskeletal Disorders (MSD), and 60 % of the European workers suffer from a painful MSD that will incapacitate 1/3 of them to work till the age of 60 and that lead to depression. Also, workforce is ageing, increasing the risk of MSD and industrial workers shortage Granting a healthy and productive work reintegration for MSD workers, via digital technologies that minimize physical load and pain, while maintaining productivity, becomes crucial.
Globally, manufacturing industries are equipped with collaborative robots (cobots), safe to be used as agile co-workers that support the human’s needs. Withal, they tend to only co-exist with humans. Attaining a truly collaborative environment, that provides customized robot motion to both workers’ and production needs, demands to address Human-Robot collaboration (HRC).
To successfully minimize the physical load of MSD workers cobots should have a holistic perception of human pain, from unobtrusive sensors, and cognitive skills to effectively assist in the most beneficial manner to the worker and task. Withal, economic feasibility requires it to also benefit healthy workers. A serious risk factor for WRMSDs is awkward postures, which can be reduced by having cobots with ergonomics perception and cognition; thus, reducing WRMSDs. This raises the challenge to develop perception and cognition HRC intelligence.
To date, no solution addresses the identification and assistance of physical limitations in HRC. Current studies only focus on the assessment of ergonomics joint overload, and muscle fatigue, on healthy subjects.
Goal
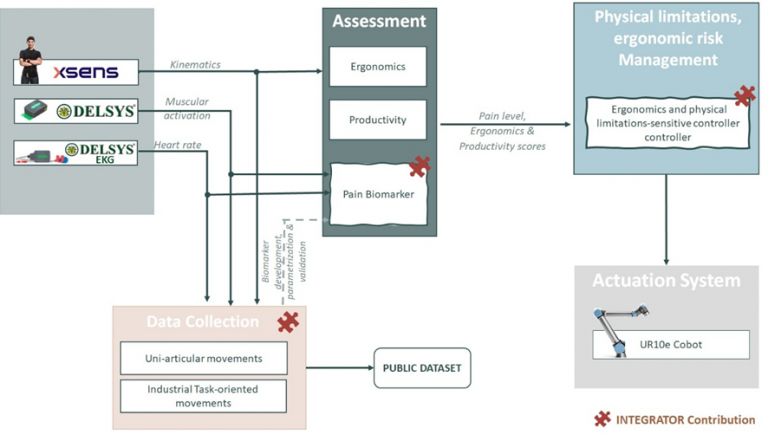
INTEGRATOR follows the hypothesis that pain is a physical limitation indicator, to deliver a pain biomarker based on biosignals to identify physical limitations. Aims to fill this knowledge gap on how to develop a HRC framework to assist both healthy and MSD workers. Advances towards truly adaptive HRC, proposing perception and control modules that can easily be configurable for different workers and tasks. It develops a sensitive multimodal controller based on Reinforcement Learning (RL) that adapts cobot trajectory as function of a worker’s specific needs, prioritizing pain and physical load reduction and, in the absence of pain, he maximization of ergonomics and productivity balance, keeping the collaboration updated towards a healthier, sympathetic, and productive HRC.
Team
INTEGRATOR strongly benefits from the multidisciplinary and international synergies. Teams up experts on robotics, electronics, statistics, medicine, cardiovascular and MSK system, biomedical devices and ergonomists. It includes members from University of Minho, Massachusetts Institute of Technology, Terapias Partilhadas – Tiago Pinhão, and Bosch Car Multimédia Portugal, S.A.
Outcomes
Expected results cover pilot demos of Human-sensitive cobots, open dataset and software modules for pain estimation and physical limitation assistance with high transference potential to other interdisciplinary domains as healthcare. Such advances will impact MSD workers reinsertion and reduce WRMSDs, promoting work without pain, well-being, and boost companies’ competitiveness through inclusive,productive, healthier workplaces, aligned with 3rd, 8th, 9th SDG of UN and European Innovation Capacity. INTEGRATOR’s impact is transversal to all industries with HRC.
INTEGRATOR is a step towards our long-term goal. We aim at a healthy, inclusive, and sustainable future, by researching and developing digital and HRC technology capable to adapt industrial tasks to all workers, with minimal impact on their health and productivity.
Grant
INTEGRATOR was financed by MIT Portugal Program’s seed projects and by FCT under grant 2022.15668.MIT.
Papers
Martins, S. M. Cerqueira, M. Balcells, E. R. Edelman, and C. P. Santos, “Towards a Human-Sensitive Controller: Learning Human Specificities in Ergonomics and Physical Constraints,” in *Proc. 2025 IEEE Int. Conf. Autonomous Robot Systems and Competitions (ICARSC)*, Funchal, Portugal, 2025, pp. 158–163, doi: 10.1109/ICARSC65809.2025.10970165.
Martins, S. M. Cerqueira, M. Balcells, E. R. Edelman, and C. P. Santos, “A Human-Sensitive Controller: Adapting to Human Ergonomics and Physical Constraints via Reinforcement Learning,” *arXiv preprint arXiv:2504.10102*, 2025. [Online]. Available: https://arxiv.org/abs/2504.10102
R. Martins, S. M. Cerqueira, A. Pombeiro, A. F. da Silva, A. M. A. C. Rocha, and C. P. Santos, “ErgoReport: A Holistic Posture Assessment Framework Based on Inertial Data and Deep Learning,” *Sensors*, vol. 25, no. 7, p. 2282, 2025. [Online]. Available: https://doi.org/10.3390/s25072282
R. Martins, S. M. Cerqueira, and C. P. Santos, “Seeking optimal and explainable deep learning models for inertial-based posture recognition,” *Knowledge-Based Systems*, vol. 306, p. 112700, 2024. [Online]. Available: https://doi.org/10.1016/j.knosys.2024.112700
R. Martins, S. M. Cerqueira, and C. P. Santos, “Combining inertial-based ergonomic assessment with biofeedback for posture correction: A narrative review,” *Computers & Industrial Engineering*, vol. 190, p. 110037, 2024. [Online]. Available: https://doi.org/10.1016/j.cie.2024.110037